Come valutare la sensibilità di una telecamera
Confronto delle prestazioni delle telecamere tramite lo standard di prestazioni di imaging EMVA1288
Include all'interno:
- Introduzione alle misurazioni delle prestazioni di imaging basate su EMVA1288
- Definizione dei diversi parametri e del modo in cui vengono misurati
- Confronto delle prestazioni delle telecamere in condizioni di scarsa luminosità con tempi di esposizione diversi
- Confronto di un sensore CCD tradizionale con un moderno sensore CMOS
- Confronto tra generazioni di sensore Sony Pregius
- Conclusione
Il confronto tra specifiche di base della telecamera come frame rate, risoluzione e interfaccia è facile; basta utilizzare il nostro nuovo selettore della telecamera per filtrare e ordinare 14+ specifiche EMVA per trovare la corrispondenza perfetta con i propri requisiti di progetto. Tuttavia, confrontare le prestazioni di imaging delle telecamere, come efficienza quantica, rumore di lettura e capacità di saturazione tende ad essere leggermente più complicato. Innanzitutto è necessario comprendere il vero significato di tali parametri.
Che cos'è l'efficienza quantica? La misura viene effettuata al picco o a una lunghezza d'onda specifica? In che modo il rapporto segnale/rumore si differenzia dal range dinamico? Questo white paper risponde a queste domande e spiega come confrontare le telecamere e sceglierne una in base ai dati relativi alle prestazioni di imaging attenendosi allo standard EMVA1288.
Lo standard EMVA1288 definisce quali aspetti delle prestazioni della telecamera misurare, come effettuare la misurazione e come presentare i risultati con un metodo unificato. La prima sezione del white paper aiuta a comprendere i diversi aspetti delle prestazioni di imaging di un sensore. Illustra i concetti di base importanti per comprendere quando prendere in considerazione il modo in cui il sensore converte la luce in un'immagine digitale e in sostanza definisce le prestazioni del sensore. La Figura 1 presenta un singolo pixel ed evidenzia questi concetti.
![]()
Figura 1: Come un sensore di immagine converte la luce in un'immagine digitale
Innanzitutto è necessario capire il rumore insito nella luce stessa. La luce è costituita da particelle, i fotoni, generate da una fonte luminosa. Poiché una fonte di luce genera fotoni con frequenza casuale, ciò costituirà rumore nell'intensità di luce percepita. La fisica della luce afferma che il rumore osservato nell'intensità della luce è equivalente alla radice quadrata del numero di fotoni generati dalla fonte di luce. Questo tipo di rumore viene definito rumore di shot.
Si noti che il numero di fotoni osservati da un pixel dipenderà dal tempo di esposizione e dall'intensità della luce. In questo articolo il numero di fotoni verrà considerato come una combinazione di tempo di esposizione e intensità della luce. Similmente, le dimensioni dei pixel hanno un effetto non lineare sulla capacità del sensore di cogliere la luce perché è necessario elevarle al quadrato per determinare l'area sensibile alla luce. Ciò verrà descritto in modo più dettagliato nel prossimo articolo, nel contesto del confronto delle prestazioni di due telecamere.
Il primo passaggio nella digitalizzazione della luce è convertire i fotoni in elettroni. Questo articolo non approfondisce il modo in cui i sensori effettuano tale conversione, bensì si occupa della misura dell'efficienza di tale conversione. Il rapporto fra elettroni generati durante il processo di digitalizzazione e fotoni assorbiti prende il nome di efficienza quantica. Il sensore di esempio in Figura 1 ha un'efficienza quantica del 50%, poiché vengono generati 3 elettroni quando 6 fotoni vengono assorbiti dal sensore.
Prima di essere digitalizzati, gli elettroni vengono conservati all'interno dei pixel, ovvero il pozzo. Il numero di elettroni che il pozzo può contenere è definito capacità di saturazione o profondità del pozzo. Se il pozzo riceve più elettroni rispetto alla propria capacità di saturazione, gli elettroni in accesso non verranno conservati.
Una volta che il pixel ha terminato di raccogliere luce, la carica presente nel pozzo viene misurata; tale misura è definita segnale. La misura del segnale nella Figura 1 è rappresentata da una freccia. L'errore associato a tale misura viene chiamato rumore di lettura.
Infine, la scala di grigio è determinata dalla conversione del valore del segnale, espresso in elettroni, in un valore del pixel in unità da analogico a digitale (ADU) 16-bit. Il rapporto fra il valore del segnale analogico e la scala di grigio digitale è definito guadagno e viene misurato in elettroni per ADU. Il parametro del guadagno come definito dallo standard EMVA1288 non dev'essere confuso con il guadagno del processo di conversione da analogico a digitale.
Nella valutazione delle prestazioni di una telecamera è molto comune fare riferimento al rapporto segnale/rumore e al range dinamico. Queste due misure delle prestazioni della telecamera prendono in considerazione il rapporto fra il rumore osservato dalla telecamera e il segnale. La differenza è che il range dinamico prende in considerazione esclusivamente il rumore di lettura, mentre il rapporto segnale/rumore include anche la sommatoria del valore efficace del rumore di shot.
La soglia di sensibilità assoluta è costituita dal numero di fotoni necessari per ottenere un segnale equivalente al rumore osservato dal sensore. Si tratta di una misura importante perché rappresenta la quantità teorica minima di luce necessaria per osservare un segnale significativo. Queste misure verranno analizzate in modo più dettagliato nei prossimi articoli.
Per aiutarvi a confrontare sensori e telecamere in base allo standard EMVA1288, FLIR ha realizzato uno studio completo di prestazioni di imaging di oltre 70 modelli di telecamera, una novità assoluta nel settore.
| Misura | Definizione | Influenzata da | Unità |
| Rumore di shot | Radice quadrata del segnale | Provocato dalla natura della luce | e- |
| Dimensioni del pixel | Pozzo, dimensioni del pixel… | Design del sensore | µm |
| Efficienza quantica | Percentuale di fotoni convertiti in elettroni dal sensore a una lunghezza d'onda specifica | Design del sensore | % |
| Rumore di lettura | Rumore del sensore in assenza di segnale | Design del sensore e della telecamera | e- |
| Capacità di saturazione (profondità del pozzo) | Quantità di carica che un pixel può contenere | Design del sensore e della telecamera | e- |
| Rapporto massimo segnale/rumore | Il massimo rapporto possibile di un segnale con tutto il rumore incluso nel segnale, incluso il rumore di shot e il rumore di lettura.” | Design del sensore e della telecamera | dB, bit |
| Range dinamico | Rapporto segnale/rumore che include esclusivamente il rumore di lettura | Design del sensore e della telecamera | dB, bits |
| Soglia di sensibilità assoluta | Numero di fotoni necessari per avere segnale equivalente al rumore | Design del sensore e della telecamera | Ƴ |
| Guadagno | Parametro che indica quanto deve essere grande il cambiamento negli elettroni per osservare un cambiamento negli ADU a 16 bit (meglio noti come scala di grigi) | Design del sensore e della telecamera | e-/ADU |
Confronto delle prestazioni delle telecamere in condizioni di scarsa luminosità
Per gli obiettivi di questo white paper prenderemo in considerazione applicazioni come il riconoscimento delle targhe o il riconoscimento ottico dei caratteri, in cui viene comunemente utilizzato l'imaging monocromatico e la quantità di luce che la telecamera può rilevare può essere limitata a causa del breve tempo di esposizione. Determinare la risoluzione, il frame rate e il campo visivo richiesti per la risoluzione di un problema di imaging è abbastanza semplice; tuttavia, stabilire se le prestazioni di imaging di una telecamera saranno sufficienti può risultare più difficile.
Solitamente questo problema si risolve con prove ed errori. Analizziamo un esempio in cui lo sviluppatore di un sistema di visione determina che una telecamera VGA con CCD ¼’’ a 30 FPS è sufficiente per l'applicazione. I test iniziali possono mostrare che la telecamera ha una sensibilità sufficiente con un tempo di esposizione di 10 ms quando l'oggetto è fermo. Osserviamo la Figura 2 che mostra un semplice esempio con caratteri B, 8, D e 0 che possono essere facilmente confusi da un algoritmo di visione. L'immagine in alto a sinistra catturata con una telecamera con CCD ¼” produce immagini adatte per l'elaborazione di immagini.
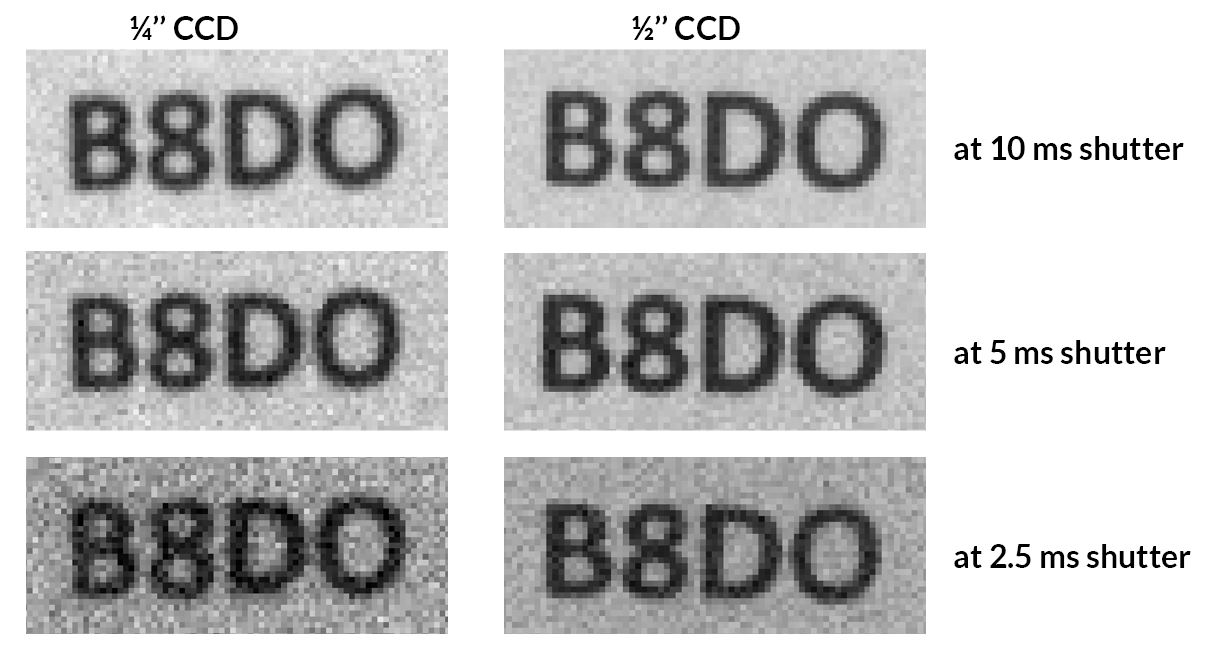
Figura 2: Risultati ottenuti con telecamere con CCD 1/4” e 1/2” con tempi di esposizione diversi
Tuttavia, quando l'oggetto inizia a muoversi, il tempo di esposizione dev'essere ridotto e la telecamera non è in grado di fornire dati utili perché le lettere “B” e “D” non sono distinguibili dai numeri “8” e “0”. Le immagini al centro e in basso a sinistra in Figura 2 mostrano deterioramento della qualità dell'immagine. In particolare, il CCD ¼’’ con un tempo di esposizione di 2,5 ms produce immagini inadatte per l'elaborazione di immagini.
Per gli obiettivi di questo esempio, si assume che non sia richiesta una grande profondità di campo e pertanto il numero F minimo dell'obiettivo è accettabile. In altre parole, non è possibile raccogliere più luce semplicemente aprendo l'otturatore dell'obiettivo.
Quindi, lo sviluppatore deve prendere in considerazione l'utilizzo di un'altra telecamera. La domanda è se un'altra telecamera offre la possibilità di migliorare le prestazioni del sistema. In genere l'utilizzo di un sensore di dimensioni maggiori viene considerato un buon modo per risolvere problemi di prestazioni in condizioni di scarsa luminosità, pertanto un sensore ½’’ potrebbe essere una buona opzione. Ma anziché continuare per prove ed errori, può essere utile prendere in considerazione le prestazioni di imaging EMVA 1288 della telecamera.
| Telecamera | Sensore | Dimensioni del pixel (μm) | Efficienza quantica (%) | Rumore di lettura (e-) | Capacità di saturazione (e-) |
| Telecamera 1/4’’ (FL3-GE-03S1M-C) | ICX618 | 5,6 | 70 | 11,73 | 14.508 |
| Telecamera 1/2’’ (BFLY-PGE-03S3M-C) | ICX414 | 9,9 | 39 | 19,43 | 25.949 |
Osservando i dati EMVA 1288 si può notare che il sensore ¼’’ ha miglior efficienza quantica e rumore inferiore, ma che il CCD ½’’ ha pixel di maggiori dimensioni e una capacità di saturazione più elevata. Questo articolo mostra come determinare se la telecamera ½’’ fornirà prestazioni migliori.
La Figura 3 confronta le telecamere tracciando il valore del segnale rispetto alla densità di luce (fotoni/µm2). Il segnale come funzione della densità di luce viene determinato con la seguente formula:

Un presupposto importante in questo articolo è che gli obiettivi abbiano lo stesso campo visivo, lo stesso numero F e le stesse impostazioni della telecamera.
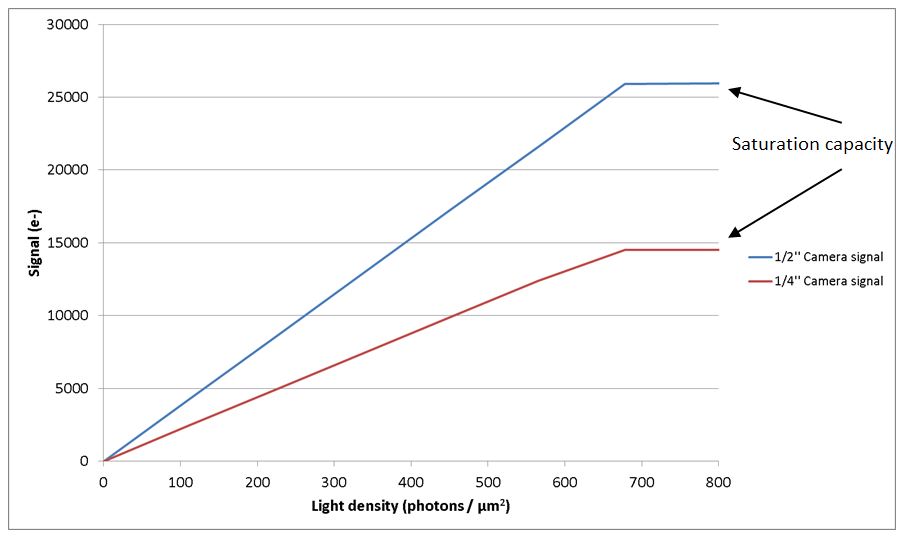
Figura 3: Segnale prodotto da telecamere con CCD 1/4” e 1/2” come funzione del livello di luce
Iscriviti per ricevere altri articoli come questo
La figura mostra che con la stessa densità di luce il sensore ½’’ genera un segnale più elevato. Inoltre, si può vedere che la saturazione si verifica a un livello di densità di luce simile di 700 fotoni/µm2; tuttavia, il sensore ½’’ ha una capacità di saturazione significativamente più elevata.
Nell'applicazione presa in considerazione in questo white paper il confronto delle telecamere dev'essere effettuato a livelli di scarsa luminosità. Pertanto prendere in considerazione il livello di rumore diventa particolarmente importante.
La Figura 4 mostra segnale e rumore a livelli di scarsa illuminazione. Il rumore presentato nella figura è una sommatoria del valore efficace del rumore di lettura e del rumore di shot, calcolato con la seguente formula:

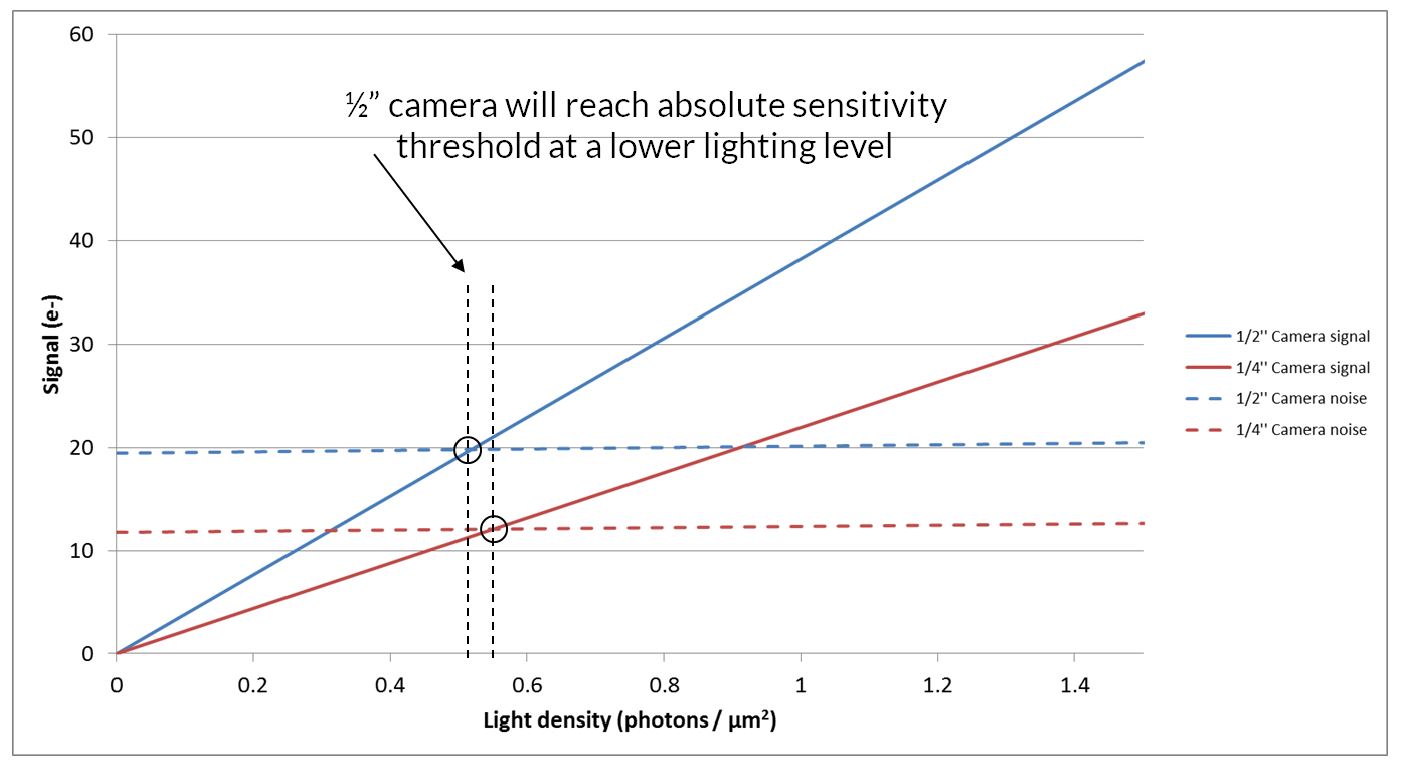
Figura 4: Segnale e rumore di telecamere con CCD 1/4’’ e 1/2’’ CCD a livelli di scarsa luminosità
Il grafico mostra che la soglia di sensibilità assoluta (il livello di luce a cui il segnale è uguale al rumore) viene raggiunta a livello leggermente più basso dal sensore ½’’ rispetto al sensore ¼’’. La misura più importante necessaria per determinare quale telecamera fornirà prestazioni migliori in applicazioni con scarsa luminosità è il rapporto segnale/rumore.
La Figura 5 mostra il rapporto segnale/rumore delle due telecamere come funzione del livello di luminosità.
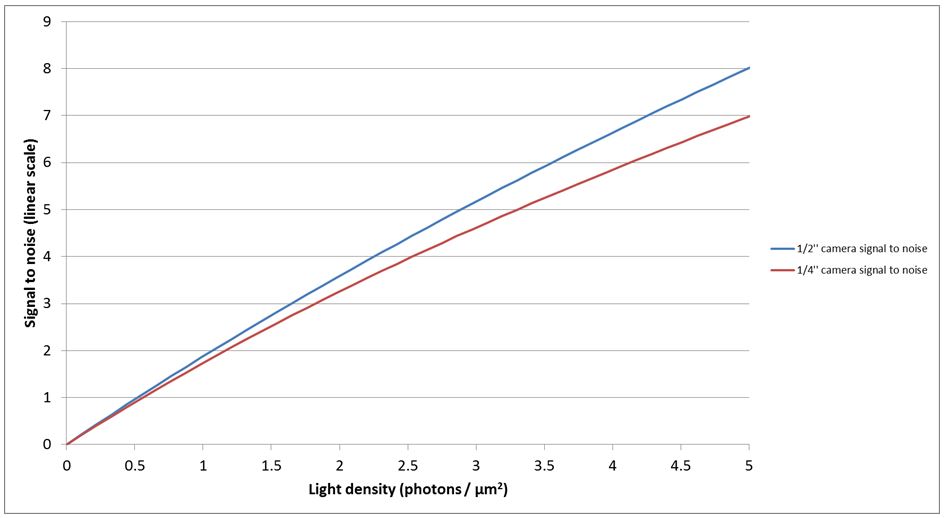
Figura 5: Rapporto segnale/rumore di telecamere con CCD 1/4” e 1/2” a livelli di scarsa luminosità
In base al rapporto segnale/rumore più elevato del sensore ½’’, la teoria suggerisce che le telecamere ½’’ dovrebbero fornire prestazioni migliori in condizioni di scarsa luminosità rispetto alle telecamere ¼’’.
Dalle immagini in Figura 2 si può osservare che con un tempo di esposizione di 2,5 ms il sensore ½’’ preserva la forma dei caratteri con tutti i tempi di esposizione, mentre il sensore ¼’’ rende difficile distinguere i caratteri. Pertanto, il sensore ½’’ fornisce prestazioni migliori e i risultati pratici sono in linea con la teorizzazione.
FLIR ha svolto uno studio esauriente sulle telecamere e ha pubblicato i risultati relativi alle prestazioni di imaging EMVA 1288. Queste informazioni possono essere utilizzate per confrontare le prestazioni di diversi modelli di telecamere. Anche se l'implementazione della telecamera influenza le prestazioni di imaging, in linea generale questo studio può essere utile per confrontare qualsiasi tipo di telecamera dotata di sensori trattati in questo documento.
FLIR offre documenti di confronto di specifiche telecamere. Contattare mv-info@flir.com per richiedere un confronto fra modelli di telecamere FLIR.
Si noti che il metodo descritto in questo white paper è utile per farsi un'idea generale della bontà delle prestazioni di una telecamera rispetto a un'altra. Questo metodo può aiutare ad escludere i modelli che probabilmente non migliorerebbero le prestazioni; tuttavia, il test definitivo delle prestazioni di una telecamera è l'applicazione reale.
Confronto di un sensore CCD tradizionale con un moderno sensore CMOS
Ora confronteremo le prestazioni di un sensore CCD tradizionale rispetto a un moderno sensore CMOS in condizioni di scarsa luminosità e in un luogo con un'ampia varietà di condizioni di luminosità.
Nella sezione precedente abbiamo mostrato che una telecamera con Sony ICX414, un CCD VGA ½’’, offre prestazioni migliori in condizioni di scarsa luminosità rispetto a Sony ICX618, un CCD VGA ¼’’. Ora confronteremo il CCD VGA ½’’ con il nuovo Pregius IMX249 Sony, un sensore CMOS con otturatore globale da 1/1,2’’ 2,3 Mpix.
A prima vista può sembrare un confronto fra “mele e arance”, tuttavia il prezzo delle telecamere dotate di questi due tipi di sensori è simile, circa 400€, la regione di interesse VGA della telecamera CMOS è di fatto più vicina alla dimensione ottica della telecamera da ¼’’ e anche i frame rate sono simili alla risoluzione VGA.
I dati EMVA 1288 di queste telecamere mostrano che il sensore CMOS IMX249 ha un'efficienza quantica significativamente migliore, un livello di rumore inferiore e una capacità di saturazione più elevata. D'altro canto, il sensore CCD ICX414 presenta pixel di dimensioni maggiori, ovvero il parametro fondamentale nell'esempio presentato nell'articolo precedente.
| Telecamera | Sensore | Dimensioni del pixel (μm) | Efficienza quantica (%) | Rumore di lettura (e-) | Capacità di saturazione (e-) |
| Telecamera 1/2’’ (BFLY-PGE-03S3M-C) | ICX414 | 9,9 | 39 | 19,43 | 25.949 |
| Telecamera CMOS 1/1,2" (BFLY-PGE-23S6M-C) | IMX249 | 5,86 | 80 | 7,11 | 33.105 |
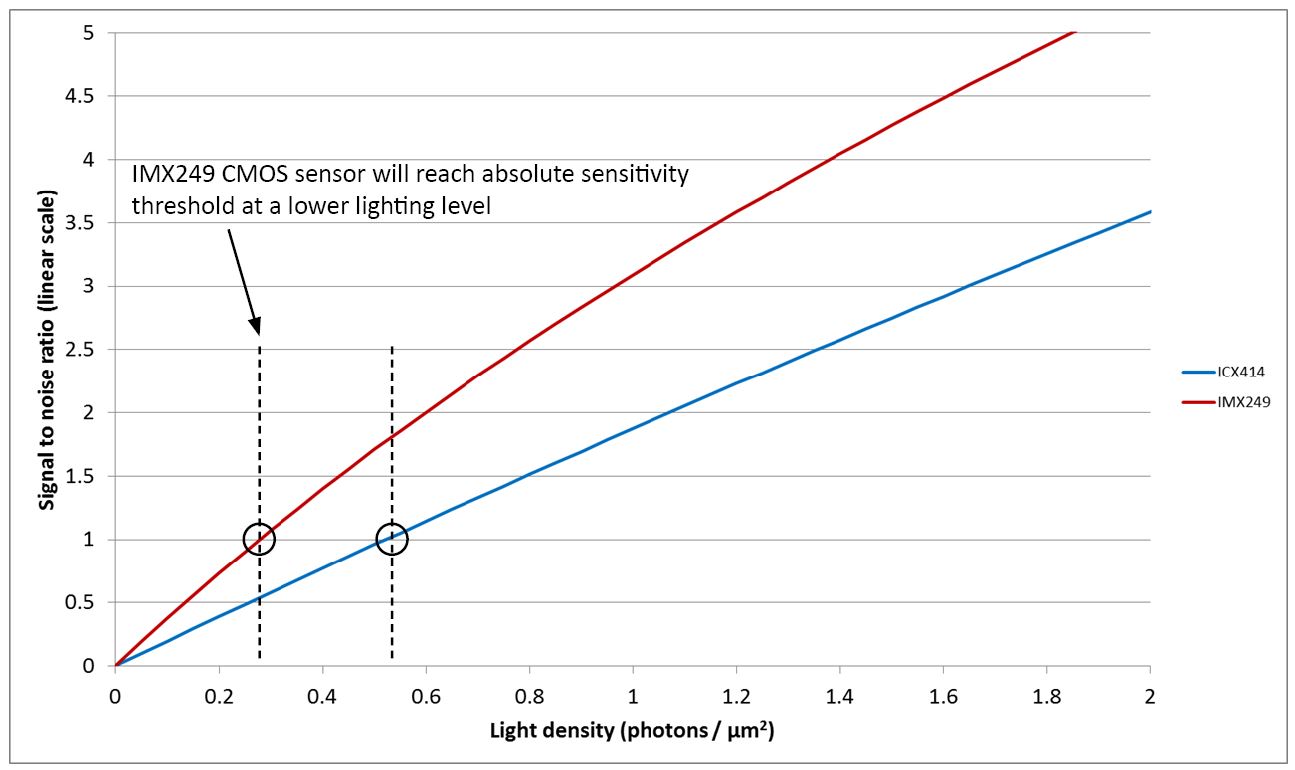
Figura 6: Rapporto segnale/rumore dei sensori CCD ICX414 e CMOS IMX249 in condizioni di scarsa luminosità
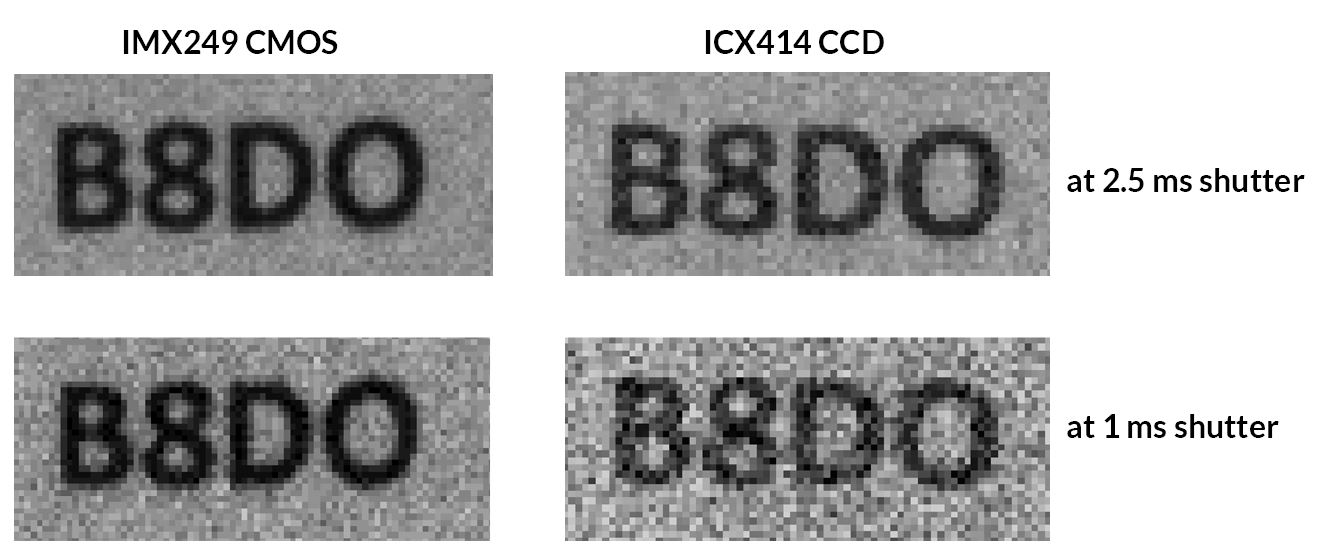
Figura 7: Risultati ottenuti con sensori CCD ICX414 e CMOS IMX249 con tempi di esposizione diversi
Il confronto più interessante è a intensità di luce più elevate per via della diversa capacità di saturazione dei due sensori. La Figura 8 mostra il segnale come funzione dell'intensità di luce nell'intero range di intensità di luce. Dal grafico si può notare che il sensore CCD ICX414 raggiunge la capacità di saturazione a circa 700 fotoni/µm2, mentre il sensore CMOS IMX249 la raggiunge a oltre 1.200 fotoni/µm2.
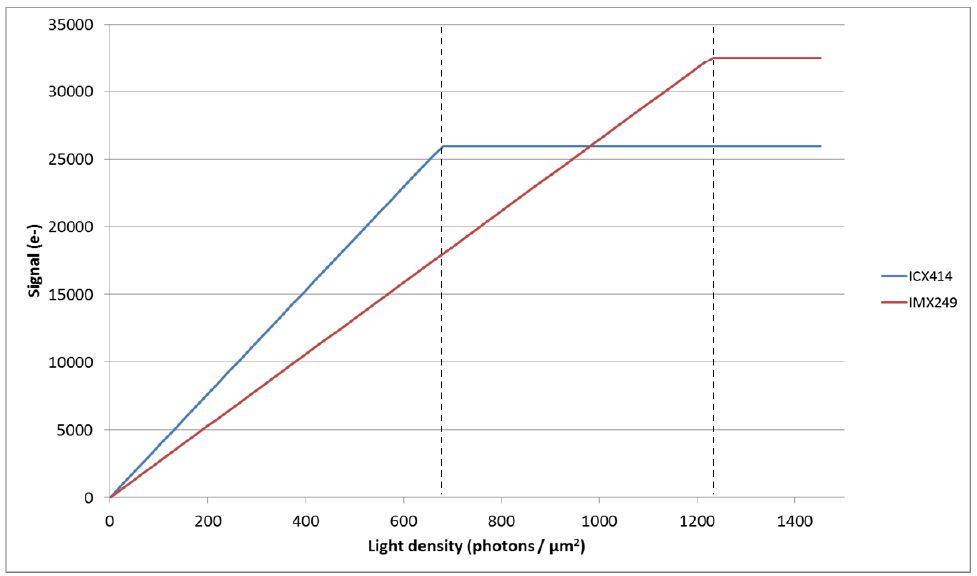
Figura 8: Segnale prodotto dai sensori CCD ICX414 e CMOS IMX249 in funzione del livello di luce
La prima conclusione che si può trarre è che l'immagine prodotta dal sensore CCD ICX414 sarà più luminosa di quella prodotta dal sensore CMOS IMX249. Se ciò non risulta evidente dal grafico, tenere conto che l'immagine verrebbe prodotta a circa 700 fotoni/µm2. Nel caso del sensore CCD ICX414, l'immagine dovrebbe avere i massimi livelli di scala di grigio, molto probabilmente saturata, mentre il sensore CMOS IMX249 produrrebbe un'immagine appena oltre il 50% della massima luminosità. Questa osservazione è significativa perché osservare la brillantezza dell'immagine per valutare la sensibilità della telecamera è un approccio abbastanza scorretto. In altre parole, presupporre che un'immagine più luminosa derivi da una telecamera dalle prestazioni migliori. Ciò non è vero e in questo esempio è vero proprio l'opposto: la telecamera che produce immagini più scure in realtà fornisce prestazioni migliori.
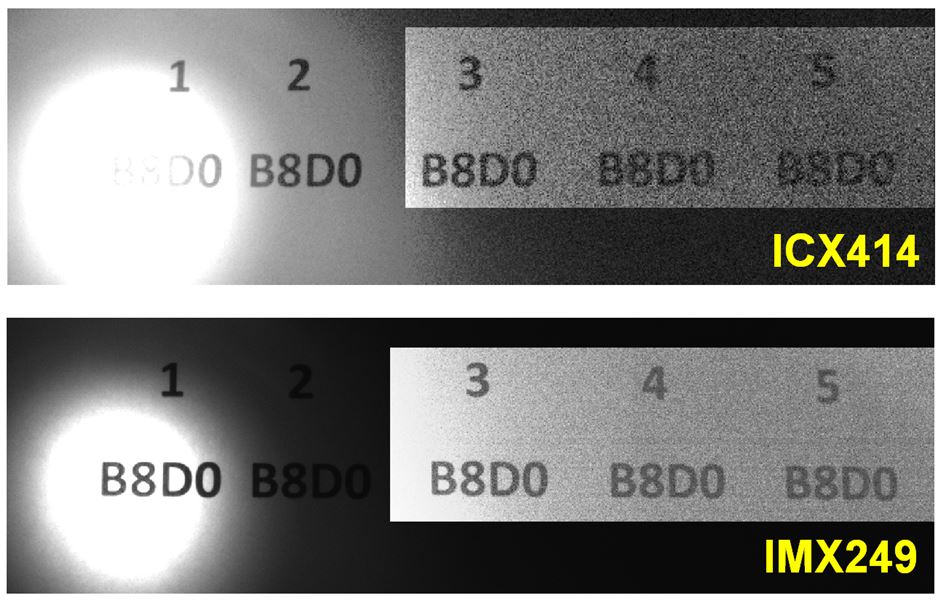
Figura 9: Risultati ottenuti con i sensori CCD ICX414 e CMOS IMX249 in condizioni di scarsa illuminazione
La seconda osservazione è che il sensore CMOS IMX249 produrrà immagini utili per l'elaborazione in una gamma più ampia di condizioni di luminosità. La Figura 9 mostra la stessa scena catturata dalle due telecamere. Si noti che la parte più scura dell'immagine è stata migliorata a scopo dimostrativo, tuttavia i dati sottostanti non sono stati modificati. Dalle immagini si può osservare che il sensore CCD ICX414 è saturo nelle aree più luminose dell'immagine e contemporaneamente presenta troppo rumore nelle zone scure perché i caratteri siano leggibili. Al contrario, il sensore CMOS IMX249 produce caratteri leggibili sia nelle zone scure sia in quelle luminose dell'immagine.
Pertanto, possiamo concludere che la recente tecnologia con otturatore globale CMOS sia una buona alternativa ai CCD nelle applicazioni che utilizzano sistemi di visione. Non soltanto i sensori sono meno costosi, hanno un frame rate più elevato a risoluzioni equivalenti e non producono effetti come striatura e sfocatura, ma superano anche le prestazioni di imaging dei sensori CCD.
Confronto tra generazioni di Sony Pregius
Come abbiamo esaminato nella sezione precedente, la dimensione del sensore influenza notevolmente le prestazioni del sensore a causa del fatto che, alla stessa condizione di luminosità, pixel più grandi consentono di raccogliere un numero massimo di fotoni superiore. Il compromesso per avere dimensione di pixel maggiore è che la dimensione del sensore sia più grande, in modo tale da adattarsi a una determinata risoluzione rispetto all'utilizzo di un sensore con dimensione di pixel minore, che aumenta il costo del sensore. La figura sotto mostra come la dimensione di pixel è cambiata tra le diverse generazioni di sensori Sony Pregius.
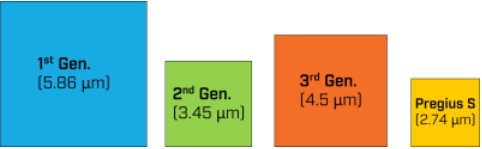
Figura 10: differenze di dimensione di pixel tra diverse generazioni di sensori Sony Pregius
Nonostante la tendenza a ridurre la dimensione di pixel (oltre alla terza generazione del sensore), le prestazioni di imaging del sensore sono aumentate, eccetto per la capacità del sensore, con ciascuna generazione. Un motivo principale per le prestazioni di imaging migliorate è dovuto al basso rumore di lettura rilevato dalla seconda generazione in poi. La figura sotto mostra come il rumore di lettura del sensore è progredito attraverso le diverse generazioni di sensore Pregius.
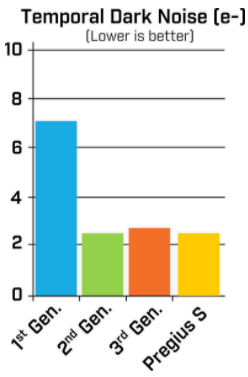
Figura 11: Pregius S mantiene un basso livello di rumore di lettura
Per ottenere una visione completa delle prestazioni di imaging del sensore, fare riferimento alla tabella seguente per le specifiche del sensore rappresentativo di ciascuna generazione Pregius.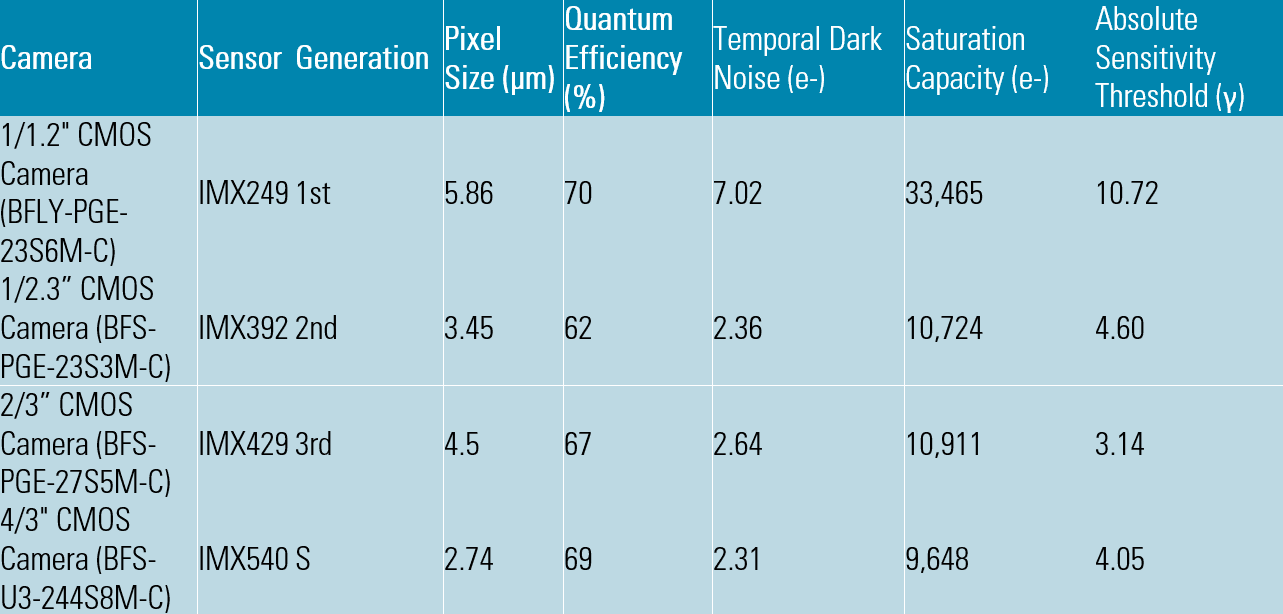
Osservando la seguente tabella, si può notare che nonostante la minore dimensione di pixel, le prestazioni di imaging del sensore Pregious S sono comparabili ai sensori di 2a e 3a generazione, ciò è dovuto al design retroilluminato del sensore che consente un angolo di ingresso più ampio per il fotone che aiuta a catturare più luce sul pixel.
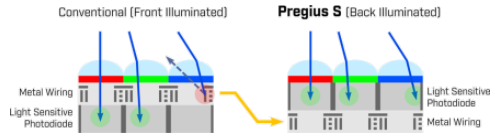
Figura 12: sensori BSI che invertono il design tradizionale di sensore fronteilluminato rendendo più semplice per i fotoni accedere al fotodiodo sensibile alla luce di ciascun pixel
Questo nuovo design consente alla famiglia di sensori Pregious S di mantenere le prestazioni di imaging delle precedenti generazioni utilizzando al contempo pixel ancora più piccoli, portando a sensori di risoluzione maggiore a prezzi relativamente bassi.
Conclusione
In questo white paper abbiamo appreso alcuni concetti fondamentali utilizzati nella valutazione delle prestazioni delle telecamere. Abbiamo presentato lo standard EMVA1288 e applicato i risultati per confrontare le prestazioni delle telecamere in diverse condizioni di luminosità. Vi sono ancora molti aspetti delle prestazioni di una telecamera da prendere in considerazione per una valutazione. Ad esempio, l'efficienza quantica cambia drasticamente a lunghezze d'onda diverse, pertanto una telecamera che offre buone prestazioni a 525nm può non funzionare altrettanto bene quando la fonte di luce si avvicina alle frequenze infrarosse. Analogamente, con tempi di esposizione prolungati, utilizzati spesso nelle immagini astronomiche e a fluorescenza, è necessario prendere in considerazione la corrente di oscurità, un tipo di rumore rilevante a livelli di luminosità estremamente scarsi.
Scegliere la telecamera giusta in base alle caratteristiche di prestazioni di imaging non è facile, ma ci auguriamo che questo white paper aiuti a comprendere meglio questo argomento complesso e affascinante.
Filtrare e ordinare 14 specifiche EMVA per trovare la corrispondenza perfetta con i propri requisiti di progetto: Prova il nostro nuovo selettore della telecamera.
Scopri di più su Machine Vision.
Articoli correlati
-
 Tecnologia e revisione dei sensori
Tecnologia e revisione dei sensori
Exmor R / STARVIS
Leggi la storia -
 Sferico
Sferico
Immagini sferiche accurate a 360° con sensori multipli pre-calibrati
Leggi la storia -
 Caso applicativo
Caso applicativo
Microscopio 3D altamente preciso e flessibile progettato per la collaborazione internazionale
Leggi la storia