Un robot guidato da telecamere pota le piante di pomodoro con Chameleon3
La mondatura delle foglie dalle piante di pomodoro è una procedura relativamente semplice che tradizionalmente comporta il taglio manuale delle foglie vecchie nella parte inferiore dello stelo. Il processo viene effettuato una volta a settimana sulle piante coltivate a scopo commerciale per promuovere la maturazione dei pomodori. Tuttavia, l'imprevedibilità e i costi elevati del lavoro manuale necessario per tale processo e la ricerca di personale motivato a svolgere un compito così monotono di recente hanno portato un consorzio di coltivatori olandesi a unire le forze con gli specialisti di automazione di Priva per la creazione di una soluzione alternativa. L'esito del loro impegno è stato lo sviluppo e l'ottimizzazione di un robot che offre ai coltivatori di pomodori un'alternativa economicamente alla portata per la mondatura manuale delle foglie dalle piante coltivate in serra.
Secondo il Dr. Tomas de Boer, esperto di progettazione meccatronica del team di sviluppo Priva responsabile della progettazione del sistema, il robot per la mondatura in serie Kompano si sposta su binari lungo la serra, su entrambi i lati dei quali le piante di pomodoro sono disposte a una distanza predeterminata (Figura 1). Il robot, dotato di un sistema di visione con lama telescopica, si sposta da una pianta all'altra in sequenza, identificando e rimuovendo le foglie vecchie.

Figura 1: Il robot per la mondatura in serie Kompano si sposta su binari lungo la serra, su entrambi i lati dei quali le piante di pomodoro sono disposte a una distanza predeterminata. The robot, which is fitted with a vision system and a telescopic cutter moves from plant to plant in a sequential fashion, identifying and then removing the leaves from each one.
Difficoltà di progettazione
Nello sviluppo del sistema, gli ingegneri di Priva dovevano accertarsi che il sistema robotizzato basato su videocamere fosse in grado di funzionare con continuità di giorno e di notte nelle difficile condizioni delle serre commerciali. Inoltre, il sistema doveva essere in grado di identificare i piccioli di piccole foglie verdi o il gambo che collega le lamine fogliari allo stelo in mezzo a una gran quantità di altre foglie verdi e di operare in numerose condizioni di illuminazione, dalla luce solare diretta all'illuminazione artificiale al buio completo durante la notte.
Per risolvere queste difficoltà, gli sviluppatori hanno deciso di costruire il sistema di visione sfruttando una coppia di telecamere stereoscopiche montate su una piattaforma mobile, insieme a un braccio dotato di lama telescopica. Le telecamere stereoscopiche, ognuna creata appositamente a partire da due coppie di telecamere Chameleon3 con sensore Python OnSemi con risoluzione 1280 x 1024 che catturano una visuale ampia sul lato destro e sinistro di ogni piantina. (Figura 2).
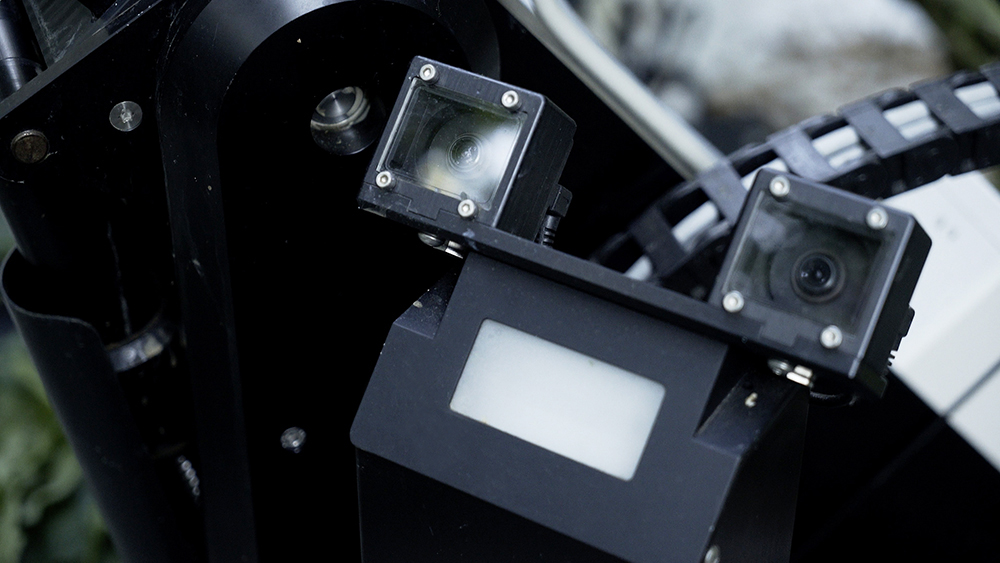
Figura 2: il sistema di visione sfrutta un paio di telecamere stereoscopiche montate su una piattaforma mobile, insieme a un braccio dotato di lama telescopica. Le telecamere stereoscopiche, ognuna creata appositamente a partire da due coppie di telecamere Chameleon3con sensore Python OnSemi con risoluzione 1280 x 1024 che catturano una visuale ampia sul lato destro e sinistro di ogni piantina.
"Per garantire che ogni coppia di telecamere stereoscopiche catturi immagini affidabili delle piante di pomodoro a prescindere dalle condizioni di illuminazione della serra, il sistema utilizza una luce stroboscopica allo xeno che illumina la pianta. Poiché la luce stroboscopica emette impulsi luminosi ogni due secondi, essa attiva le telecamere stereoscopiche alla cattura di immagini a intervalli di 30 microsecondi. Ciò consente al sistema di catturare ogni volta un set di immagini uniforme" afferma il Dr. de Boer.
Quando le due telecamere stereoscopiche hanno catturato una coppia di immagini, queste vengono trasferite da un'interfaccia USB a un PC con sistema operativo open source Ubuntu e al sistema operativo del robot (ROS), un framework software open-source di Open Source Robotics Foundation, Inc. (OSRF) per la creazione di applicazioni robotiche su una varietà di piattaforme.
Software di sistema
Le funzioni di elaborazione delle immagini su misura di OpenCV vengono poi usate per elaborare le immagini di entrambe le coppie di telecamere per identificare la posizione delle foglie sulle piante di pomodoro in un certo range di altezza definita in precedenza dal coltivatore. Una volta identificata la posizione delle foglie, il software per l'elaborazione delle immagini calcola con esattezza le coordinate tridimensionali dei piccioli che devono essere tagliati dalla lama situata al termine del braccio robotico.
I dati coordinati generati dal software per l'elaborazione delle immagini vengono trasmessi al sistema operativo del robot (ROS), che trasferisce i dati a un set di servomotori intelligenti che alimenta i motori che guidano il braccio robotico telescopico alla corretta posizione sulla pianta. Una volta che questo raggiunge la destinazione, la lama taglia il picciolo, rimuovendo le foglie dalla pianta (Figura 3).
Poiché la coppia di telecamere stereoscopiche è montata sulla stessa piattaforma del braccio robotico, quando il braccio si muove per tagliare uno specifico gruppo di piccioli, anche le telecamere si spostano in una nuova posizione, dove catturano un altro set di immagini della pianta da un'angolazione diversa.
"Queste nuove immagini vengono elaborate in parallelo durante l'operazione di taglio per identificare ulteriori foglie da eliminare dalla pianta nell'operazione successiva. Questo processo interattivo continua finché il sistema non rileva altre foglie da rimuovere dalla pianta. Dopo aver effettuato un controllo finale, l'operazione di taglio si interrompe e il robot si sposta lungo i binari della serra per raggiungere la pianta successiva" ha dichiarato il Dr. de Boer.

Figura 3: Una volta che il software per l'elaborazione delle immagini ha determinato la posizione dei piccioli sulla pianta, tali dati vengono utilizzati per guidare il braccio robotico telescopico del robot nella posizione corretta. Una volta che questo raggiunge la destinazione, la lama taglia il picciolo, rimuovendo le foglie.
Tocchi finali
Attualmente, gli sviluppatori del robot per la mondatura in serie Kompano stanno collaborando con i membri del consorzio olandese per finalizzare un prototipo del sistema.
I membri del consorzio che hanno collaborato con Priva saranno i primi a poter beneficiare del sistema quando questo diverrà finalmente disponibile, all'inizio del prossimo anno. In base al numero di robot ordinati dal consorzio, il prodotto diverrà disponibile per altri coltivatori di pomodori a partire da giugno 2017. A partire da giugno di quest'anno, è anche possibile preordinare il robot online.
Durante l'utilizzo, ci si aspetta che il robot per la mondatura sia in grado di mondare da 0,75 a 1 ettaro di piante, in base alla densità delle foglie sugli steli. In strutture più ampie, i coltivatori potranno scegliere di utilizzare più robot o di combinare il sistema automatizzato con il lavoro manuale.
Secondo il Dr. de Boer, il robot per la mondatura in serie sarà il primo di molti robot che l'azienda progetta di sviluppare per il mercato orticolo. Questi sistemi di nuova generazione automatizzeranno altri incarichi intensivi, come il raccolto di verdure come i cetrioli.
Chi è Priva Group
Priva crea un clima di crescita. Azienda leader nello sviluppo e nella produzione di tecnologie per l'ottimizzazione delle condizioni ambientali e della gestione dei processi. Priva offre soluzioni per il mercato orticolo, creando soluzioni di automazione e non con una combinazione unica di software, hardware e servizi.
www.privagroup.com
Articoli correlati
-
 Tecnologia e revisione dei sensori
Tecnologia e revisione dei sensori
Exmor R / STARVIS
Leggi la storia -
 Sferico
Sferico
Immagini sferiche accurate a 360° con sensori multipli pre-calibrati
Leggi la storia -
 Caso applicativo
Caso applicativo
Microscopio 3D altamente preciso e flessibile progettato per la collaborazione internazionale
Leggi la storia